فهرست این مقاله ( با کلیک روی هر عنوان به آن قسمت منتقل می شوید ) :
معرفی سنسور های بکار رفته در کواد کوپتر
همانطور که می دانید، امروزه بازار پهباد های کنترلی و کوادکوپتر های دوربین دار با سرعت فوق العاده ای در حال رشد است و شرکت های گوناگون از هیچ ترفندی برای ارتقای محصولات پروازی خود دریغ نمی کنند .
یکی از همین ترفند هایی که باعث افزایش کارایی پهباد دوربین دار و جذب مشتری می شود، بهره گیری انواع سنسور ها می باشد که وجود آن ها در پهباد امکانات خاصی را فراهم می کند و باعث افزایش بهره وری آن می شوند . اما از آنجایی که این سنسور ها داخل بدنه پهباد قرار می گیرند، متاسفانه بسیاری از کاربران این اجزای حیاتی را نمی شناسند و یا از اطلاعات کافی در مورد آن ها برخوردار نیستند .
به همین دلیل ما تصمیم گرفتیم در مقاله معرفی سنسور های بکار رفته در هلی شات انواع سنسور های مورد استفاده در پهباد های امروزی را به شما عزیزان معرفی کنیم، و توضیحات مختصری در مورد تکنولوژی و کارایی آن ها ارائه دهیم .
سنسور چیست ؟
سنسور های دستگاه های الکتریکی حساس و نسبتا کوچکی هستند که داخل بدنه کوادکوپتر و مولتی روتور قرار می گیرند تا امکانات و ویژگی های متنوعی همچون بازگشت به خانه، حفظ ارتفاع ثابت ، حفظ تعادل ، اجتناب از موانع ، جلوگیری از کج شدن بیش از حد و سایر قابلیت های خودکار را در اختیار آن ها قرار دهند .
انواع سنسور در کوادکوپتر ها
در ذیل به مهم ترین انواع سنسور های بکاررفته در کوادکوپتر ها اشاره می کنیم .
شتاب سنج ( Accelerometer )
Accelerometer یک دستگاه الکترومکانیکی است که به منظور فراهم کردن اطلاعات مربوط به نیروی شتاب مورد استفاده قرار می گیرد و چرخش پهباد در سه محور x، y و z را مشخص می کند .
این سنسور همچنین زاویه گرایش کوادکوپتر را در موقعیت های ثابت تعیین می کند. برای درک بهتر عملکرد این سنسور فرض می کنیم کوادکوپتر در موقعیت افقی وضعیتی ثابت دارد . در این حالت خروجی محور های x و y برابر صفر و خروجی محور z برابر 1 گرم خواهد بود .
این 1 گرم در واقع همان نیروی جاذبه است که به تمای اشیای موجود در جو زمین وارد می شود. حالا اگر کوادکوپتر در راستای محور x به میزان 90 درجه بچرخد، خروجی محور های x و z برابر صفر و خروجی محور y برابر 1 گرم خواهد بود. چیزی که سعی داریم به شما بگوییم این است که به طور کلی در طول حرکت کوادکوپتر و به وجود آمدن چرخش در جهت های گوناگون ، خروجی هر یک از محور های x، y و z بین صفر تا یک خواهد بود .
Accelerometer نیز این مقادیر را در فرمول خاصی قرار می دهد و نهایتا زاویه گرایش پهباد و کوادکوپتر را به دست می آورد.

واحدهای اندازه گیری داخلی ( Inertial Measurement Units )
واحد اندازه گیری داخلی به همراه سیستم مسیریابی GPS دو ابزار بسیار مهم در حفظ جهت و مسیر پرواز به حساب می آیند. با توجه به این که امکانات تعبیه شده در پهباد ها روز به روز در حال گسترش است و حالت های هوشمندانه پرواز آن ها بسیار پیشرفت کرده است، IMU و GPS نقش حیاتی در رعایت قوانین و مقررات مربوط به پهباد ها و عملیات های پروازی اجرا شده توسط آن ها دارند.
واحد اندازه گیری داخلی اطلاعات مورد نیاز خود را از مغناطیس سنج های چند محوره موجود در قطب نما های کوچک و بسیار دقیق دریافت می کند. این قطب نما ها کوچکترین تغییرات را حس می کنند و داده های مربوط به آن ها را به پردازنده مرکزی موجود در IMU ارسال می کنند تا این سنسور در نهایت جهت، گرایش و سرعت پهباد را تعیین کند.
سنسور بارومتر ( Barometer )
سنسور بارومتر یا همان فشارسنج اساسا به منظور اندازه گیری ارتفاع پرواز پهباد از سطح دریا مورد استفاده قرار می گیرد. این سنسور همانطور که از نام آن مشخص است ، با اندازه گیری فشار هوا می تواند ارتفاع از سطح دریا را تخمین بزند .
زمانی که ارتفاع پرواز پهباد و کوادکوپتر افزایش می یابد، سنسور Barometer ابتدا تغییرات به وجود آمده در فشار هوا را محاسبه می کند، و در ادامه با ارسال یک سیگنال الکتریکی این تغییر ارتفاع را در اختیار سیستم کنترل پرواز قرار می دهد.

ژیروسکوپ (Gyro Sensor)
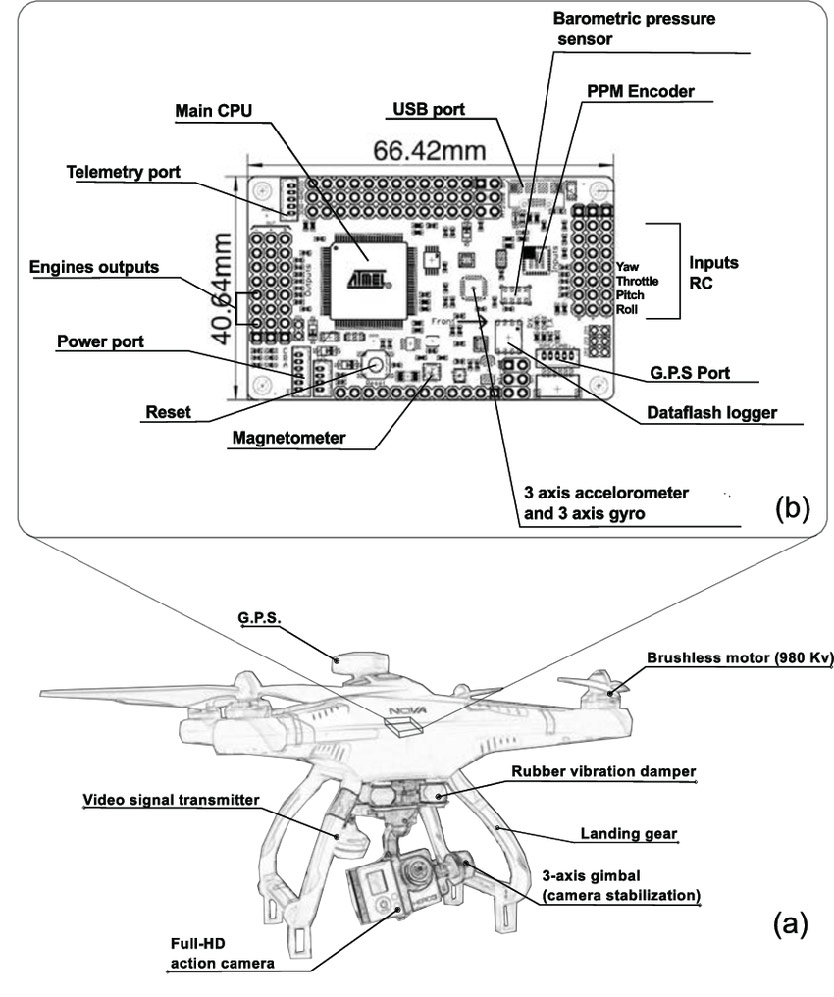
سنسور ژیروسکوپ سرعت زاویه ای را در سه محور ( x، y و z طبق تصویر بالا ) اندازه گیری می کند . به عبارت دیگر این سنسور قادر است میزان تغییرات زاویه ای به وجود آمده را در طول حرکت های چرخشی روی سه محور اندازه گیری کند .
Gyro Sensor حتی در معمولی ترین پهباد ها نیز یک سنسور حیاتی به حساب می آید و وجود آن بسیار مهم است . سنسور ژیروسکوپ اطلاعات مربوط به تغییر زاویه را در اختیار درایور های کنترل کننده موتور قرار می دهد تا سرعت چرخش موتور ها در هر لحظه بر اساس این اطلاعات تنظیم شود .
به این ترتیب تعادل پهباد حتی پس از به وجود آمدن تغییرات زاویه ای حفظ خواهد شد و اثری از حرکت های عجیب و قریب نخواهد بود . از سوی دیگر سنسور ژیروسکوپ باعث می شود پهباد چرخش هایی بدون نقص داشته باشد و دقیقا به همان زاویه ای که از سوی خلبان مشخص شده است دست یابد.

سنسور اولتراسونیک ( Ultrasonic Sensor )
سنسور های اولتراسونیک نیز همچون بارومتر به منظور تخمین مسافت مورد استفاده قرار می گیرند ، اما روش اندازه گیری و محاسبه در آن ها کاملا متفاوت است . این سنسور ها از دو قسمت Rx و Tx تشکیل شده اند که به صورت همزمان کار می کنند و از طریق ارسال امواج با طول موج مشخص می توانند فاصله بین موانع و کوادکوپتر یا پهباد را اندازه گیری کنند . لازم به ذکر است که این سیستم معایبی نیز دارد و گاهی اوقات در هوای متراکم و جو غلیظ نمی تواند عملکرد قابل قبولی داشته باشد .

سیستم GPS
Global Positioning System یا به طور مختصر GPS یک سیستم مسیریابی ماهواره ای است که با استفاده از یک گیرنده رادیویی سیگنال های ارسالی از سوی ماهواره را دریافت می کند تا به این ترتیب موقعیت، سرعت و زمان پهباد را تعیین نماید . هلی شات های برند dji مجهز به gps جهت پرواز های بسیار دقیق هستند .
این نوع مسیریابی نسبت به سایر روش ها دقیق تر است و در صورتی که سیستم های پیشرفته تر استفاده شود، خطای آن ها تنها به چند سانتی متر محدود می شود. از سوی دیگر مدار های فوق العاده کوچک موجود در گیرنده های GPS باعث می شود این سیستم از لحاظ اقتصادی بسیار مقرون به صرفه باشد و در دسترس همگان قرار گیرد . علاوه بر آن سیگنال های GPS تقریبا به تمام مناطق کره زمین ارسال می شوند تا نگرانی بابت قطع ناگهانی و خارج از دسترس بودن آن ها وجود نداشته باشد .
امیدواریم مقاله معرفی سنسور های بکار رفته در کوادکوپتر توانسته باشد به سوالات شما در پیرامون خرید کوادکوپتر و سنسور های متنوع موجود در آن ها پاسخ دهد . برای کسب اطلاعات بیشتر در مورد هر یک از این سنسور ها و آشنایی کامل با عملکرد آن ها منتظر مقاله های بعدی ما باشید .
بسیارعالی
سلام.ممنون.
اطلاعات جامعی بود
خوشحالیم که مورد قبول واقع شد .
سلام
ارور سنسور کمرا در فانتوم ۴ به چه معناست و راه حل ان چیست
سلام احتمالا در اثر بروز ضربه و یا فشار دوربین آسیب سخت افزاری دیده و باید از نزدیک چک بشه .
موفق باشید .
عالی بود . ممنون کاش منابع و رفرنس ها رو می گذاشتید . یک دنیا ممنون
سلام ، وقت بخیر
منبع مجموع خود جها آرسی و کارشناسان واحد تعمیرات می باشند .
موفق باشید
درود. ای کاش دیگر عرضه کنندگان هلیشات نیز این گونه مطلب های سودمند را منتشر کنند.
نظر لطف شماست.
انرژی خوب شما باعث می شود تا ما تلاش برای ارایه مطالب قوی تر و کاربردی تر نماییم .
این سنسور همچنین زاویه گرایش کوادکوپتر را در موقعیت های ثابت تعیین می کند. برای درک بهتر عملکرد این سنسور فرض می کنیم کوادکوپتر در موقعیت افقی وضعیتی ثابت دارد . در این حالت خروجی محور های x و y برابر صفر و خروجی محور z برابر 1 گرم خواهد بود
بابا این که یک گرم نیست.
1g هست.
شتاب گرانش.
سلام ، وقت بخیر
ممنون از شما بابت دقت و اطلاع رسانیتون . حتما اصلاح می گردد .